SBC-MNQA军用汽车驾驶模拟器
一、系统简介:
军用汽车驾驶模拟器,军用动感驾驶模拟器是我公司独立自主开发的最新一代驾驶模拟系统。它涉及虚拟仿真、电子单片机应用工程、数据图像处理、自动控制、嵌入计算机,机械自动化控制、实时数据传输等技术,同时它采用以下两项技术:

外壳:冷轧板外壳,配32寸显示器 规格: 1700*1980*1400(长*宽*高)

汽车模拟器驾驶舱内图
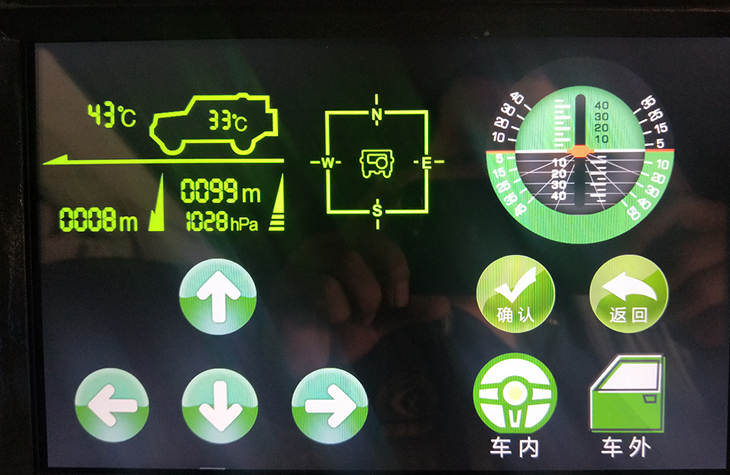
模拟器右边触摸屏: 确定、返回、上下左右功能键选择,车内和车外景切换。
1、人机交互技术:通过计算机输入、输出设备,以有效的方式实现人与计算机对话。输入输出设备包括:伺服控制系统、力反馈真车方向盘、真车仪表盘、离合油门刹车踏板、挂档器及手刹柄等,其中使用高精密形霍尔传感器和光学编码器来采集所需要的模拟信号,通过微控制器的处理来实现功能。
2、多轴运动控制器的运动控制反解算法,改善现有技术中多轴运动控制系统对配套伺服电机实施控制时速度和效率不足的缺陷,快速响应训练车辆的动感,达到与画面完全同步的动感效果。
整个系统可以实现驾驶教学、娱乐休闲。与其它模拟驾驶系统相比,具有精确度高,实用性强,无延迟、高寿命、动感系统免维护等特点。
二、产品特点:
1、带力反馈方向盘:驾驶者握紧方向盘时能感觉到汽车传动系统带来的回力,让驾驶者感觉更真实,就像现实中开车一样,撞上物体之后,方向盘会有反作用力。
2、操控系统:离合刹车油门、方向盘、档位、手刹、左右转向灯、远近光灯切换、大灯行车灯、喇叭、雨刮器等保留原车功能改装一应俱全,每一个操作信号采用动作灵活,无阻滞的磁感应非接触式高精度传感机构进行数据分析处理并实时传回计算机,实现图像实时转变。
3、显示系统:采用单屏或三个高清显示器组合而成的三联屏,采用高清显卡,可达到5760*1080的超高清分辨率。
三、产品参数:
1.科德军用驾驶模拟训练器主要模拟大型车辆驾驶训练及应急避险训练,操作平台硬件与大型车实车相似,系统软件可模拟多种车型。
2.整体系统运行流畅,无明显卡顿情况,系统运算仿真周期不大于100ms;实时性:操控触发到系统显示的时间小于0.1s。
3.符合交通部JT/T378-2014《汽车驾驶培训模拟器》(互动型汽车驾驶培训模拟器Ⅱ级)行业标准。
4.使用电源/负荷:单相(220V)/520W。
5.计算机配置:
主板:B360 CPU: I5
显卡:1650 4G
内存:8G
硬盘:240G
显示器:单视景显示屏尺寸为32寸,分辨率1920*1080。
模拟器右边10寸触摸屏: 确定、返回、上下左右功能键选择,车内和车外景切换。
6.外观:
1)外观造型:全新风格、时尚新颖,采用优质钢材的冷轧板外壳而成,汽车烤漆工艺相同的优点。
2)车型勇士车型(可根据客户要求定制车型)
3)颜色:军绿色,整体外观美观大方。(颜色可选)
4)开放式舱体,方向盘、变速机构、手制动、加油踏板、制动踏板、离合器踏板等实装主要操作部件均需要模拟,其外观尺寸、部署相对位置、操作行程,以及操作力度感受与实际基本一致,操纵机件性能工作可靠、操作灵活、低噪音。
5)具有座舱和显示器的互动视景系统,并具有错误驾驶记录和提示功能。互动视景系统应具备图形工作站、显示设备、音响功放等组成,可实现驾驶员前景140度以上视角的屏幕显示。
7.转向盘总成:
1) 真车方向盘;
2)转向力度切向力:20N-120N范围;
3)内部传动有电机、齿轮、同步轮、光电编码器组成,产生力反馈效果,力感同实车,可自动回位。
8.脚刹、油门、离合总成:
1)采用真车配件,利用电磁感应原理,及拉力、反弹力效果,达到与汽车驻车加速效果一致;
2)脚刹、油门、离合踏板行程、弹力按行业标准(JT/T378-2014)参数标准制定。
9.档位、手刹:
1)手刹操纵杆拉力:20-100N;
2)档位变速杆操纵力:10N-50N。
10.仪表盘:
1)仿真仪表,可实时反馈车速与发动机转速;
2) 功能:时速表、转速表、远近光灯、示廓灯、雾灯、左右转向灯、车门、手刹、安全带等信号。
11.组合开关:
1)采用真车配件;
2)主要功能:左转向灯、右转向灯、远光灯、近光灯、雨刷、应急灯、喇叭、点火开关等。
12.座椅 :真车座椅,可调节前座椅后及靠背斜度,配合三点式安全带结构,带开关感应装置控制信号。
13.电子电路:采用非接触式电磁感应原理,避免传感器与硬件之间产生接触与磨损,将电路的使用寿命周期最大化。
14.各开关信号操作通过各精密传感器,数据采集经硬件与模拟教学软件结合,达成上下位机通讯。
15.采用专用小键盘 嵌入中控台,操作简单、个性。
16.软件具备语音提示、视频教学、评分标准、多模式场景等
四、模拟软件:
1.软件与硬件适配,对接流畅。
2.具备多种训练、考核场景:
1)基础驾驶(驾驶预习、起步直线行驶停车、转向、制动)
2)场地驾驶(定位停车、坡道起步、上坡转弯换挡、通过单凸路、通过单双边桥、通过圆形错位障碍、通过错位小巷、通过限制门、上坡转弯减档)
3)式样驾驶(公路掉头、倒车移位、侧方移位)
4)道路驾驶(一般道路驾驶、城市道路驾驶、山区道路驾驶、高速道路驾驶)
5)复杂路段驾驶(泥泞路段驾驶、涉水路段驾驶、场地模拟高速公路驾驶)
6)特殊天候条件下驾驶(雨天驾驶、雾天驾驶、雪天驾驶)
7)夜间驾驶(灯光使用、有照明条件下夜间驾驶、无照明条件下驾驶)
8)应急避险(转向失控处置、制动失灵处置、车辆爆胎处置)
3.模拟器软件版本要求:模拟器软件应由四个主要系统构成:VehicleDynamics动力学仿真系统,VehicleMaterial路谱仿真系统,VehicleControl控制系统,VehicleCom通讯系统。
1、VehicleDynamics负责实时整车仿真模型及仿真工况;
2、VehicleMaterial负责模拟各种路面仿真工况;
3、VehicleControl负责车辆控制运算;
4、VehicleCom负责上位机与下位机的通讯。
五、软件场景:
1.1软件编写原理:
1.1.1 针对驾驶专业模拟训练器,采用基于 Unity3D 渲染引擎、以动力学为物理引擎,对车辆的动作以及特效进行了预先封装,同时采用插件化的模块分离设计方法,进行车辆模拟以及动作和特效的扩展。
1.1.2 使用汽车动力学仿真数学模型,根据模拟驾驶车辆的质量、速度、悬挂性能、摩擦系数等自身属性参数和硬件方向盘的输入值,以及平原、山地、沙漠等典型地形路面特征信息,结合硬件解析模块得到的相关操作指令(启动、转向、倒车、换档),实现模拟车辆驾驶前进、倒退、转弯、速度变化、姿态变化等多种驾驶物理效果;根据油门、刹车输入的值结合当前档位确定纵向加速度,实现模拟车辆加速、刹车等运行效果;根据车身悬挂系统、运行速度结合地形,实现模拟车辆运行中的颠簸效果和车辆姿态信息。
1.1.3 运用动力学计算出的实时数据用于三维视景展示模块中的数据输出展示,预留的驾驶数据实时输出接口,实现与外界动力学反馈设备相连,增强驾驶体验,提高驾驶技能。
2.军用汽车理论学习模块:具备单独界面军用汽车构造、驾驶要领、管理与使用等 理论资料。

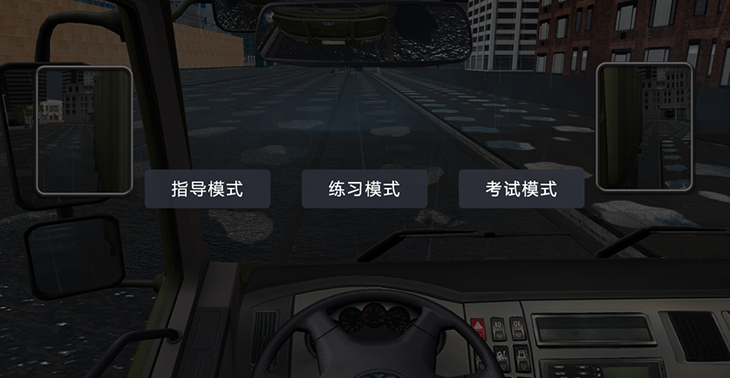
图一:软件主界面菜单选择
3.新训汽车驾驶员模块:基本知识、基础驾驶、场地驾驶、式样驾驶、道路驾驶、复杂路段驾驶、特殊天候条件下驾驶、夜间驾驶、战地驾驶、应急避险、铁路水路航空输送车辆装卸载、综合演练等科目。

图二:基础驾驶

图三:场地驾驶

图四:样式驾驶

图五:道路驾驶

图六:一般道路驾驶
4.驾驶员训练模块:

图七:场地训练驾驶
图八:模式驾驶
5.地方驾考训练模块:理论知识、课目二、课目三、课目四。

图九:理论模拟
6.应急避险体验模块:三超一疲劳系统、酒驾体验系统、危险场景驾驶体验系统等。

7.其它模块:
7.1、仿真车模型:10 种典型虚拟车辆模型:东风猛士、北汽勇士、 EQ1118、EQ1121、 EQ2102、SX2150、SX2190、豪泺 ZZ2197、东风天锦、大客车等,并可根据需要拓展、定制个 性化车辆模型。

图十:解放CA1121J车型

图十一:皮卡车车型

图十二:勇士车型

图十三:东风天锦车车型

图十四:东风猛士车型

图十五:解放CA1125J车型
7.2、汽车设置界面:调整车辆各项动力学参数、车辆后视镜及视角调整。

图十六:功能菜单设置
7.3、仿真场地库:设有单边桥、隧道、掩体、错位小巷、高架桥、"8"字型路、"S" 型路、铁路平车、直角转弯、弧线倒车、直线倒车、倒车移位、侧方停车、渐窄门等训练课目;快速路、卵石路、横断路、盘山路等常见道路场景,滑坡、落石等模拟障碍物;具有良好的扩展性,可根据实际需要进行个性化定制。

图十七:场地训练功能选择界面
7.4、单机运行能实现 1 名受训人员操纵驾驶单元进行道路、场地驾驶模拟训练。

图十八:驾驶训练界面
7.5、场景画面:单通道分辨率1920*1080、可支持单通道,三通道分辨率5760*1080可支持三通道视景。

图十九:场景画面功能设置界面
7.6、场景天气类型具有:晴天、阴天、雨天、雪天、雾天、夜晚等模块,不同天气有不同场景效果,同时路面有不同的属性。道路上的行人密度、车辆密度可调节.

图二十:天气、车辆、行人自由切换功能界面




